Humanoide:
Boston Dynamics: Atlas meistert alle Hindernisse
Dass moderne Roboter eine Menge können, ist bekannt. Die Manöver, die Boston Dynamics seinem Atlas-Roboter beigebracht hat, verschlagen den meisten menschlichen Zusehern aber ziemlich sicher den Atem.
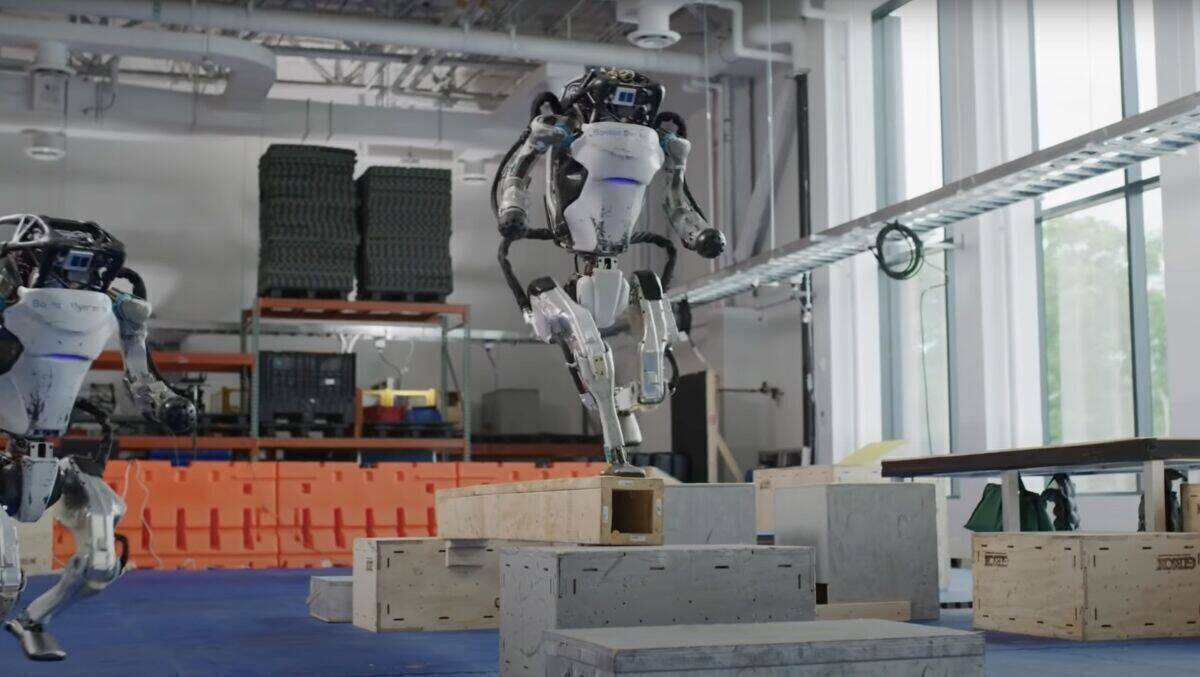
Foto: Boston Dynamics Screenshot
Egal ob springen, über schiefe Ebenen rennen oder einen perfekten Salto rückwärts durchführen: Das neue Video der Roboter-Schmiede Boston Dynamics zeigt Manöver seines "Atlas" getauften Meisterstücks, bei denen alle Menschen außer vielleicht Kunstturnern längst an die Grenzen ihrer körperlichen Fähigkeiten gelangen.
In einem fünfminütigen Film zeigt das US-Unternehmen, zu was ein moderner Roboter inzwischen in der Lage ist und wo dabei die größten Schwierigkeiten der Techniker, Entwickler und Programmierer liegen. Im letzten Video vom Dezember zeigte das Unternehmen übrigens, dass die Roboter sogar tanzen können.
Komplexer Parcours
Beweisen muss sich der seit über fünf Jahren immer weiter entwickelte "Atlas" in einem eigens geschaffenen, äußerst komplexen Parcours. So springt der Roboter unter anderem über Abgründe, balanciert auf einem Balken, steigt Treppen und führt einen Rückwärtssalto aus… und zwar von einem Tisch. Die Vorbereitung des Videos und die Programmierung der Roboter hat viele Monate in Anspruch genommen und obwohl der Parcours letztlich perfekt durchlaufen wurde, gab es am Ende ein Problem. Einer der beiden Roboter war so programmiert, nach der Landung aus dem Salto eine Siegesgeste mit der Faust auszuführen. Dabei kam er fast ins Stolpern, was zeigt, welche Probleme selbst kleinste Manöver bereiten können. Zu sehen ist der ganze Durchlauf auch bei Twitter im Kanal von Boston Dynamics.
"Humanoide sind in mehrfacher Hinsicht interessant", sagt Scott Kuindersma, der bei Boston Dynamics das Atlas-Team leitet, im Unternehmensblog. "Sie entsprechen unserer Vorstellung von einem Roboter der Zukunft, der überall hingehen und alles tun kann. Sie sind vielleicht nicht das beste Design für eine bestimmte Aufgabe, aber wenn man eine Plattform bauen wollte, die eine Vielzahl von physischen Aufgaben erfüllen kann, wissen wir bereits, dass ein menschlicher Formfaktor dazu in der Lage ist."
Die Kombination aus Größe und Komplexität führe dabei zu Kompromissen bei der Hardwareentwicklung in Bezug auf das Verhältnis von Stärke zu Gewicht, Laufzeit, Bewegungsbereich und physische Robustheit. "Gleichzeitig muss unser Steuerungsteam Algorithmen entwickeln, die mit der physikalischen Komplexität dieser Maschinen umgehen können, um ein breites Spektrum an energiereichem und koordiniertem Verhalten zu erzeugen," so Kuindersma weiter. Letztendlich treibe das Ausloten der Grenzen eines humanoiden Roboters wie Atlas Hardware- und Software-Innovationen voran, die sich auf alle Roboter bei Boston Dynamics übertragen lassen.
Kuindersma: "Es geht darum, Verhaltensweisen an den Grenzen der Fähigkeiten des Roboters zu entwickeln und sie alle in einem flexiblen Steuerungssystem zusammenarbeiten zu lassen." Am Ende gibt es viele wichtige Probleme, die man beim Parkour nicht angehen muss, "aber das ist nicht der Punkt. Wir versuchen nicht, alles auf einmal zu lösen. Die Arbeit, die wir jetzt leisten, ermöglicht es uns, eine solide Grundlage zu schaffen, um die nächste Reihe von Forschungsproblemen anzugehen," erläutert Kuindersma.